Лазерный локатор трёхмерного изображения «РТ-ЛИДАР»
|
Растр Технолоджи по заказу АО «КБТОЧМАШ им. А. Э. Нудельмана» разработал матричный фотоприёмный модуль макета лазерного локатора трёхмерного изображения «РТ-ЛИДАР» для дальнейших испытаний в рамках НИР «Лидар-ФПУ». Цель НИР – разработка составной части фотоприёмного модуля 3D лазерного локатора, включая аппаратно-программные средства обработки сигналов в реальном времени от ИК фотоприёмной матрицы, формирования, визуализации и анализа цифровых потоков информации о дальности, яркости объекта и окружающей фоноцелевой обстановки. Новизна НИР заключается в освоении принципиально новых матричных фотоприёмных модулей отечественного производства для 3D лазерного локатора. Основой устройства является ИК фотоприёмная матрица ФЭМ-28М производства НПО «Орион». В ходе выполнения НИР были разработаны и изготовлены фотоприёмные модули, программное обеспечение анализа и обработки 2D и 3D изображений, даны оценки качества и точности фотоприёмных матриц при измерении дальности до объектов, обоснованы алгоритмы обработки сигналов дальности и изображений.
|
|||||
|
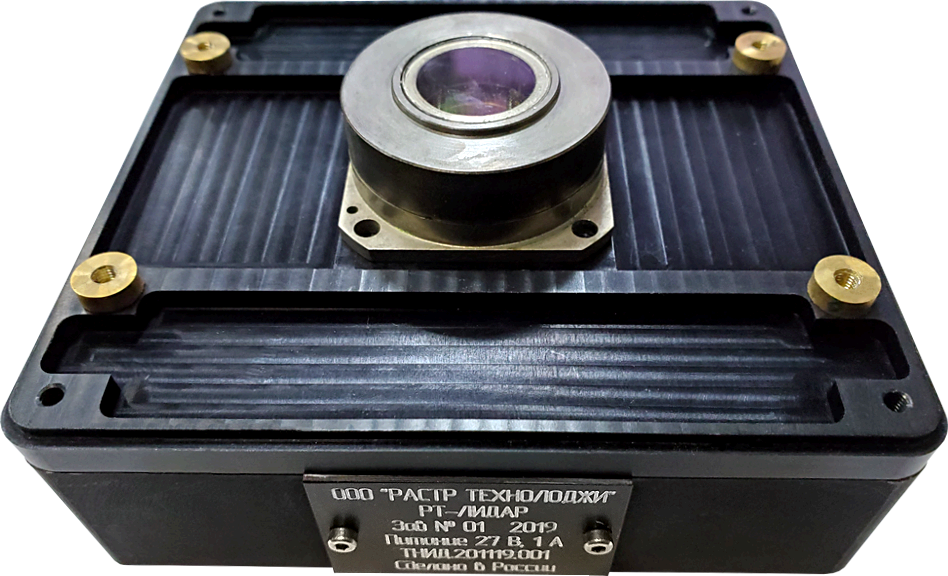
Фотоприёмный модуль «РТ-ЛИДАР» производства Растр Технолоджи для макета лазерного 3D локатора |
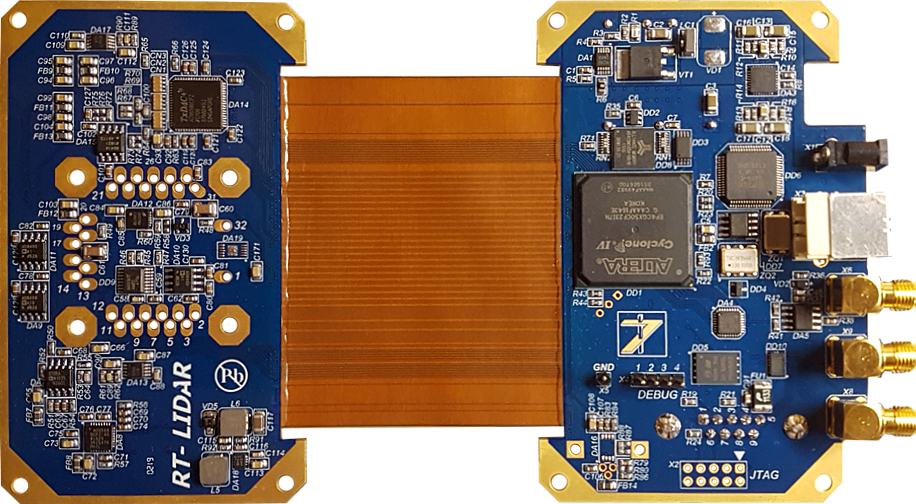
Гибко-жёсткая плата «РТ-ЛИДАР» |
||||
|
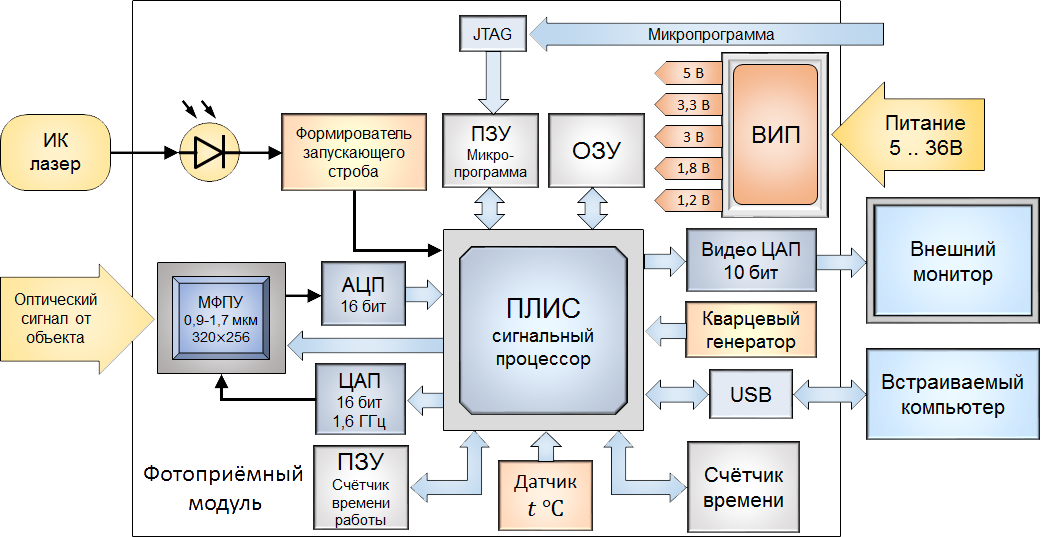
Фунциональная схема лазерного 3D локатора 1.05 мкм «РТ-ЛИДАР»
Подробнее о технологии измерения дальности и построения карты глубины сцены в реальном масштабе времени изложено в публикации |
|||||